I took an analytic topology course my second year of college, and didn’t use it for much else for several years (switching over to more analysis and theoretical computer science).
This is just a review I did quickly of some basic concepts from the course. I largely just wanted to review the formal definitions of some properties and a few classification theorems. I’m not covering any algebraic topology.
Overview
The point of topology: The point of topology is to abstract sets to just their overall shape, invariant to continuous deformations. For example, suppose you have a complicated set of objects $S$. If these objects were digitized in some way, we would have to work with a representation of these objects via a map $\Sigma: S \to \mathbb{R}^n$. For example, by embedding images into $\mathbb{R}^n$ using their pixel RGB values. A good representation preserves the structure of $S$, such as objects which are conceptually similar in $S$ are mapped to nearby points in $\mathbb{R}^n$.
Now suppose you want to change or reparameterize this representation, while preserving two desiderata:
- objects that are close remain close (thus still encoding the structure of $S$), and
- distinct objects remain distinct (thus preserving its descriptive power)
These constraints restrict you to transformations of the representation space that are continuous, and invertible with continuous inverses—that is, homeomorphisms. Such transformations preserve exactly the topological structure of the space.
From this perspective, topology lets us reason about the intrinsic structure of a dataset that is independent of the particular coordinates or representation we happened to choose. This makes it a particularly useful tool for data science.
Definition
A topology on a set $X$ is a set of “open subsets” $\mathcal{T}$ that satisfy:
- $\varnothing, X \in \mathcal{T}$
- For any set $\mathcal{S} \subseteq \mathcal{T}$ $$\bigcup_{S \in \mathcal{S}}S \in \mathcal{T}$$ and for finite $\mathcal{S}$, $$\bigcap_{S \in \mathcal{S}}S \in \mathcal{T}$$ A classic example is $\mathbb{R}^n$, which has a natural topology defined by open sets induced by Euclidean distance.
Bases
A basis of a topology can be thought of as a generating set. More precisely, a basis for a topology $(X, \mathcal{T})$ is a set $\mathcal{B}$ of sets such that:
- $$\bigcup_{B \in \mathcal{B}}B = X$$
- If $B_1, B_2 \in \mathcal{B}$, then for any $x \in B_1 \cap B_2$ there exists $B_3 \in \mathcal{B}$ so $B_3 \subset B_1 \cap B_2$ and $x \in B_3$ (this is included to ensure the set generated by this basis is actually a topology)
Then the topology generated by $\mathcal{B}$ is
$$\mathcal{T}_{\mathcal{B}}:=\left\{\bigcup_{B \in \mathcal{S}}B \mid \mathcal{S} \subseteq \mathcal{B}\right\}$$Examples of Topologies
Note that for any $S \in \mathcal{T}$, the set $\{S' \cap S \mid S' \in \mathcal{T}\}$ defines a topology on $S$. This defines the subset topology.
There is a notion of product topology, but its slightly tricky to formalize correctly. For an index set $I$ (not necessarily countable), let $(X_i, \mathcal{T}_i)$ be topologies for $i \in I$. Then consider all Cartesian products of open sets such that finitely many are not $X_i$:
$$ \mathcal{B} = \left\{\prod_{i \in I} S_i\mid\forall i.\ S_i \in \mathcal{T}_i, |\{i \in I \mid S_i \neq X_i\}| < \infty\right\} $$This set is a basis, and the product topology is the topology generated by this basis.
Finally, consider an equivalence relation $\sim$, and consider $q:X \to X /\sim$ defined by mapping $x$ to its corresponding element in $X/\sim$. Then the open sets
$$ \mathcal{T}_{\sim} = \{U \mid q^{-1}(U) \in \mathcal{T}\} $$defines a topology on $X/\sim$. This is called the quotient topology with respect to $\sim$.
Limits
A set $(x_n)_{n=1}^\infty$ converges to $x$ if for any open set $U$ with $x \in U$, there exists $N$ so $\forall n \geq N$, we have $x_n \in U$. We say $x$ is the limit of $x_n$.
$x$ is a limit point of a set $S$ if for all open $U$ with $x \in U$, $(U\backslash \{x\}) \cap S \neq \varnothing$.
A subset of $X$ is closed if its complement is open. In $T_1$ spaces, a set is closed if and only if it contains all its limit points.
Functions and equivalence
For topologies $(X_1, \mathcal{T}_1), (X_2, \mathcal{T}_2)$, $f:X_1 \to X_2$ is continuous if the preimage of open sets are open, i.e., $U_2 \in \mathcal{T}_2 \implies f^{-1}(U_2) \in \mathcal{T}_1$.
$f$ is a homeomorphism if it is bijective, continuous, and has continuous inverse. This defines topology’s core notion of equivalence – if there are homeomorphisms between two topological spaces, they can be thought of as having the same underlying topological structure.
Consider two spaces $(X_1, \mathcal{T}_1)$, $(X_2, \mathcal{T}_2)$ and two continuous maps $f, g:X_1 \to X_2$. A homotopy is a continuous map $H:X \times [0, 1] \to Y$ such that
- $H(x, 0) = f(x)$
- $H(x, 1) = g(x)$ e.g., if $f$ and $g$ are two different paths, these paths are homotopic if one can be continuously deformed to the other in this way.
Connectedness
A topological space is connected if is cannot be written as the union of two disjoint nonempty open sets.
A path of $X$ is a continuous map $f:[0, 1] \to X$. $X$ is said to be path-connected if for any $x, y \in X$, there exists a path $f$ with $f(0)=x$, $f(1)=y$.
A loop of $X$ is a continuous map $f:S^1 \to X$ ($S^1$ is a unit circle). $X$ is simply-connected if it is path-connected and any loop $f$ is homotopic to a constant map $g:S^1 \to X$ with $g(x) = x_0$ for some $x_0$.
Separability
The separability of a topological space measures the degree to which it can be described by a countable set of objects – or, in other words, the degree to which it can be described and approximated if digitized or processed algorithmically.
A subset $Q \subseteq X$ is dense if for all open $U$, $U \cap Q \neq \varnothing$.
A topology is called separable if it contains a dense, countable subset. In other words, this shows that all points can be approximated via a countable subset of $X$, meaning you can approximate the behavior of the topology at arbitrary resolution.
A topology is called second-countable if it has a countable basis. This means the topology can be fully described using a countable set of objects without approximation.
Separation Axioms
There are several different ways to classify the extent to which a topology can separate different points. There are called separation axioms. They are denoted $T_n$ for different $n$, where higher $n$ indicates the topology has more power to separate different points.
$T_0$ spaces (Kolmogorov): for any two distinct $x \neq y$, there exists an open set containing one and not the other.
$T_1$ spaces (Fréchet): for any two distinct $x \neq y$, there exists an open set containing $x$ and not $y$, and an open set containing $y$ and not $x$.
$T_2$ spaces (Hausdorff): for any two $x \neq y$, there exist disjoint open sets $U, V$ with $x \in U$, $y \in V$. This is probably the most important axiom to remember.
$T_3$ spaces (Regular): if the set is $T_1$ and we have a point $x$ and a closed set $S$ with $x \notin S$, there exists disjoint open sets $U$ and $V$ with $x \in U$, $S \subseteq V$.
$T_4$ spaces: if the set is $T_1$ and we have closed disjoint sets $R, S$, there exist disjoint open sets $U, V$ with $S \subseteq U$, $R \subseteq V$.
Compactness
An open cover of $X$ is a set $\mathcal{S} \subseteq \mathcal{T}$ with
$$\bigcup_{S \in \mathcal{S}}S = X$$A sub-cover of an open cover $\mathcal{S}_1$ is an open cover $\mathcal{S}_2 \subseteq \mathcal{S}_1$.
A topological space is compact if every open cover has a finite subcover. One way to think about this is that any description of $X$ within the language of open sets only needs finitely many sets, there isn’t any kind of “infinite” structure within the neighborhoods of $X$.
An early result in topology is the Heine-Borel Theorem: this states that a subset of $\mathbb{R}^n$ is compact if and only if it is closed and bounded.
Another key result is Tychonoff’s Theorem: any product of compact spaces is compact.
Manifolds
Manifolds are topologies that behave locally like $\mathbb{R}^n$. Many datasets we use in the real world can be modelled with low-dimensional manifolds.
More formally, $X$ is an $n$-manifold if:
- $X$ is Hausdorff
- $X$ is second-countable
- For every point $x \in X$, there exists open $U$ with $x \in U$ and $U$ is homeomorphic to some $V \subseteq \mathbb{R}^n$.
Classification of Manifolds
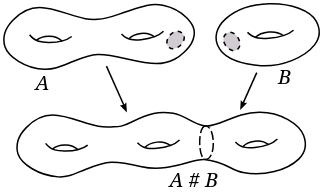
A connected sum of two manifolds $X$ and $Y$ can be described as the topological spaces achieved by connecting them with a bridge.
More formally:
Taking two open subsets $U, V$ of $X, Y$ homeomorphic to subsets of $\mathbb{R}^n$.
Consider homeomorphisms $\phi_U:U' \to U$, $\phi_V:V' \to V$ between $U, V$ and open $U', V' \subseteq \mathbb{R}^n$.
Then we can take closed balls $B_U \subseteq U'$, $B_V \subseteq V'$. Let $\operatorname{int}(B_U), \operatorname{int}(B_V)$ and $\partial B_U, \partial B_V$ be the interiors and boundaries of these balls.
Note that we can construct a homeomorphism $\tau:\partial B_U \to \partial B_V$. Then we have that $\phi_U^{-1} \circ \tau \circ \phi_V$ forms a homeomorphism between $\phi_U(\partial B_U)$ and $\phi_V(\partial B_V)$. Let $\phi_{X \to Y}$ denote this homeomorphism
Then we construct the connected sum by:
Taking topologies $X \backslash \phi_U(\operatorname{int}(B_U))$, $Y \backslash \phi_V(\operatorname{int}(B_V))$ (“cutting out” the balls)
Taking their disjoint union
We can construct an equivalence relation $\sim$ on this disjoint union with $X \sim Y$ if and only if $x = y$ or $y = \phi_{X \to Y}(x)$.
Then we can take the quotient topology with respect to this equivalence relation (“connecting” the two cut out holes).
This gives the connected sum. The connected sum is denoted $X \# Y$.
The connected sum allows us to decompose manifolds into connected sums of “prime” manifolds that cannot be decomposed more easily.
Classification of $1$-manifolds
The only two connected $1$-manifolds without boundaries, up to homeomorphism, are
- $S^1$ (circle)
- $\mathbb{R}$
Classification of Surfaces
A key result is that all closed, connected surfaces, can be written as one of:
- $\#_{i=1}^gT^2$ (a connected sum of torii)
- $\#_{i=1}^k\mathbb{RP}^2$ (a connected sum of the real projective plane)
- $S^2$ (a sphere) there also exists an algorithm to decompose a surface into one of these.
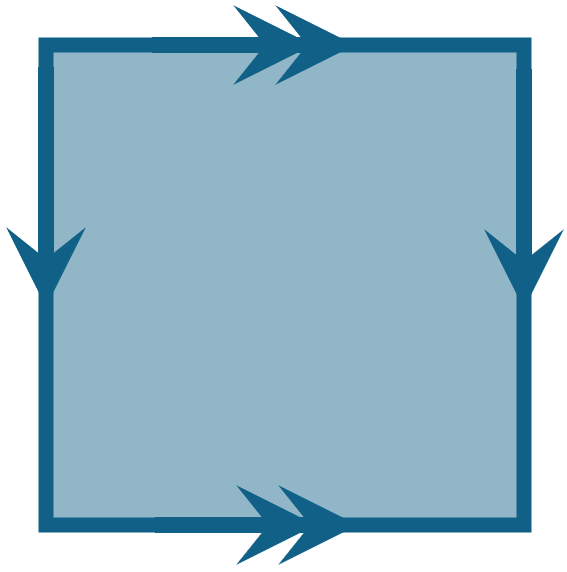
Torus
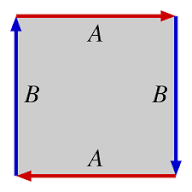
Real Projective Plane
Classification of 3-manifolds
TBD, the geometrization conjecture is an entire field of study on its own and I want to read more into it